Embodied Space Studio [UE Plugin]
Embodied Space Studio is an Unreal Editor workflow panel for authoring embodied motion from text, spatial constraints, saved motion data, and batch prompt collections. It connects the editor to the Kimodo bridge/runtime service, lets you stage prompt timing and body constraints in the Timeline, previews generated motion on either the embedded Preview viewport or the main Level viewport, and turns the selected motion into UE Animation Sequence assets for SOMA, Manny, Quinn, MetaHuman, or a custom retarget target.
The motions were generated using Kimodo, a controllable human motion generation system described in: Davis Rempe et al., "Kimodo: Scaling Controllable Human Motion Generation," arXiv:2603.15546, 2026. https://arxiv.org/abs/2603.15546
- Use Generate to start or check the bridge service, refresh the model catalog, choose dataset/skeleton/version, load a model, choose the source preview mesh or default SOMA, and generate motion from Timeline prompts and constraints.
- Use Preview Target for fast isolated inspection, or Level Target to work directly in the main Level viewport with Spawn SOMA, Use Selected, Focus, and Unlink.
- Use the Timeline to create prompt sections, scrub frames, play generated samples, import bulk prompt text, and place Full-Body, 2D Root, hand, and foot constraints.
- Use Constraints when a motion needs exact body poses, hand/foot placement, root path control, saved skeleton edit states, or external
constraints.jsoninput. - Use Load/Save to reopen saved
ue_preview_manifest.jsonoutputs, save reusable example metadata, and open generated output folders. - Use Visualize to control playback speed, mesh/skeleton/foot-contact overlays, floor/environment display, camera FOV, Timeline visibility, and constraint label display.
- Use Export to bake the active motion as a SOMA Animation Sequence, build or refresh rooted SOMA retarget assets, select target character assets, tune collision/foot anchoring options, and export a target Animation Sequence.
- Use Batch to process many prompts or already-generated SOMA jobs, export multiple target families, preview generated naming, and resume or stop a batch run.
- Use Misc for production utilities: placing batch animations into a level, creating a MetaHuman player character, merging MetaHuman body/garment meshes, packaging a Fab product, offline collision/grounding cleanup, MetaHuman Level Sequences, and prompt subtitles.
When a button is disabled, check the status summaries above the active section. Most actions require a healthy bridge service, a loaded model, a valid preview clip, a matching source/target mesh, a selected Level Target, or a valid /Game output path. Runtime Output and Bridge Output logs are designed for troubleshooting and can be copied from the UI.
Kimodo Docker Runtime Setup
You can use AI coding agents such as Codex, GitHub Copilot, or Claude Code to help configure the Kimodo Docker runtime automatically by following the instructions in this section. Give the agent access to the bridge repository and ask it to complete and verify the documented setup steps. Before running the runtime, review any generated commands and confirm that local paths, credentials, model files, and GPU settings are correct for your machine.
Embodied Space Studio uses a local Docker Compose runtime to serve Kimodo motion generation to Unreal Engine. The Unreal Engine plugin is distributed through Fab, while the Docker bridge runtime is distributed separately through GitHub:
https://github.com/richieBao/embodied-space-studio-kimodo-bridge
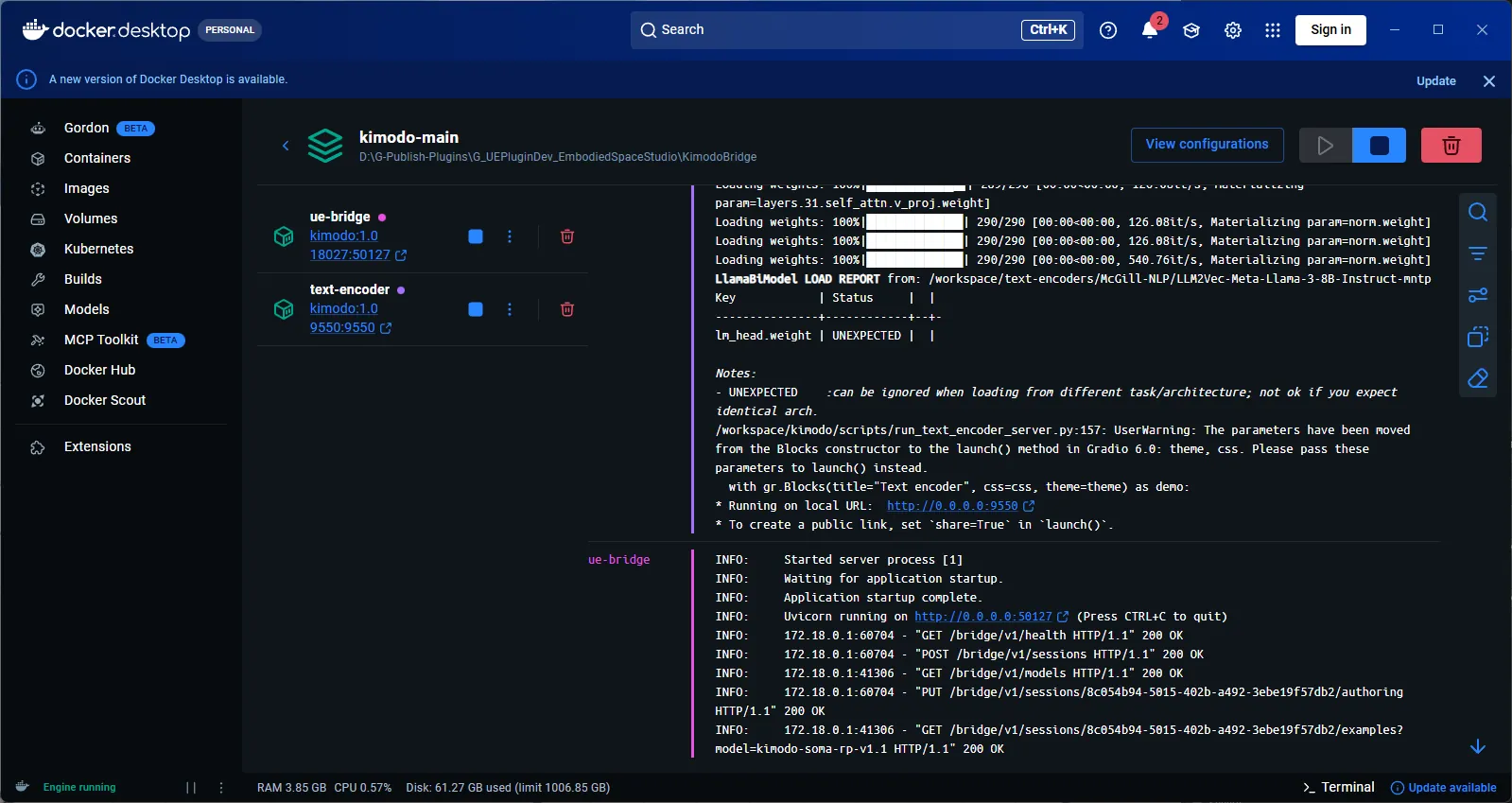
In this bridge repository, kimodo-main is the Docker Compose project name declared in docker-compose.yaml. The always-on services are text-encoder and ue-bridge; demo is optional for the standalone Kimodo web demo.
The Docker bridge is self-contained. It can be placed in any local folder and does not need to live inside or beside an Unreal project. Any Unreal project with the Embodied Space Studio / KimodoMotionAuthoring plugin can connect to the same local bridge endpoint:
http://127.0.0.1:18027/bridge/v1
Install order
- Buy/download and install the Embodied Space Studio plugin from Fab into any Unreal project that will use Kimodo generation.
- Install and start Docker Desktop.
- Download or clone the GitHub bridge repository to a user-chosen folder.
- Request Hugging Face access to
meta-llama/Meta-Llama-3-8B-Instruct, then authenticate with a Hugging Face token. - Download the required Kimodo checkpoint and text encoder model files into the bridge folder.
- Copy
.env.exampleto.env, then edit paths for your machine. - Build/start the Docker bridge and connect to
http://127.0.0.1:18027/bridge/v1from the plugin's Generate tab.
Prerequisite: install Docker Desktop
Docker is required before you can start the Kimodo runtime. Embodied Space Studio does not install Docker automatically.
-
Install WSL for the Docker Desktop WSL 2 backend. Open PowerShell as Administrator and run:
wsl --install --no-distribution
wsl --updateThe
--no-distributionoption installs WSL without installing an additional Linux distribution such as Ubuntu. Docker Desktop manages the WSL distributions it requires. If the installation prompts you to restart, restart your computer. -
Verify the installed WSL version:
wsl --versionDocker Desktop requires WSL version 2.1.5 or later; using the latest available WSL version is recommended.
-
Install Docker Desktop for Windows from the official Docker website.
-
Start Docker Desktop and wait until the Docker Engine is running. In Settings > General, enable Use WSL 2 based engine. On supported systems, this option may already be enabled by default and may not be visible.
-
For GPU generation, install a compatible NVIDIA driver and make sure Docker Desktop can access the GPU.
-
Open PowerShell and confirm Docker is available:
docker --version
docker compose version
Docker is required for Generate, Refresh Models, Connect Docker Bridge, and other Kimodo runtime features. Loading already generated previews or using some offline Unreal-only utilities may not require the Docker runtime to be running.
Python environment note
The official Kimodo local virtual-environment setup uses Python 3.10:
conda create -n kimodo python=3.10
conda activate kimodo
Embodied Space Studio normally runs Kimodo through Docker, so users do not need to create this local Python environment unless they want to run Kimodo scripts outside the containers.
Download the bridge repository
Choose any local folder for the bridge. The commands below use <BridgeRoot> as the folder where you cloned or extracted the GitHub repository.
git clone https://github.com/richieBao/embodied-space-studio-kimodo-bridge.git
cd embodied-space-studio-kimodo-bridge
Downloading the repository ZIP from GitHub and extracting it to a folder such as D:/EmbodiedSpaceStudio/KimodoBridge is also fine.
The bridge folder should contain:
<BridgeRoot>/docker-compose.yaml
<BridgeRoot>/Dockerfile
<BridgeRoot>/ue_bridge_service
<BridgeRoot>/scripts
<BridgeRoot>/checkpoints
<BridgeRoot>/text-encoders
The ue-bridge container runs the bridge API service packaged in <BridgeRoot>/ue_bridge_service; it no longer mounts a specific Unreal project or runs a server.py from the Fab plugin folder.
Runtime layout
| Service | Container name | Purpose | Host access |
|---|---|---|---|
text-encoder | text-encoder | Loads the LLM2Vec text encoder and provides embeddings to Kimodo services. | http://127.0.0.1:9550 |
ue-bridge | ue-bridge | Runs the bridge API used by the plugin Generate / Models / Health actions. | http://127.0.0.1:18027/bridge/v1 |
demo | demo | Optional Kimodo interactive demo service. | http://127.0.0.1:7860 by default |
The services are built from Dockerfile into the kimodo:1.0 image. The image is based on NVIDIA PyTorch, installs the Kimodo Python runtime, includes the local kimodo-viser fork, and runs through the container entrypoint that maps files back to the host user.
Download model files
Model weights are intentionally not included in the GitHub repository. Download them from the official model pages and review their licenses before use.
Install the Hugging Face CLI and authenticate on the host machine:
pip install --upgrade huggingface_hub
hf auth login
Download the Kimodo checkpoint:
https://huggingface.co/nvidia/Kimodo-SOMA-RP-v1.1
Place it under:
<BridgeRoot>/checkpoints/Kimodo-SOMA-RP-v1.1/model.safetensors
<BridgeRoot>/checkpoints/Kimodo-SOMA-RP-v1.1/config.yaml
Example command:
hf download nvidia/Kimodo-SOMA-RP-v1.1 --local-dir checkpoints/Kimodo-SOMA-RP-v1.1
Before downloading the text encoder, open the gated Meta Llama model page, request access, and wait until your Hugging Face account has been granted access:
https://huggingface.co/meta-llama/Meta-Llama-3-8B-Instruct
Kimodo's LLM2Vec text encoder uses three pieces:
Raw gated base model:
https://huggingface.co/meta-llama/Meta-Llama-3-8B-Instruct
MNTP LoRA adapter:
https://huggingface.co/McGill-NLP/LLM2Vec-Meta-Llama-3-8B-Instruct-mntp
Supervised LoRA adapter:
https://huggingface.co/McGill-NLP/LLM2Vec-Meta-Llama-3-8B-Instruct-mntp-supervised
Place them under:
<BridgeRoot>/text-encoders/McGill-NLP/LLM2Vec-Meta-Llama-3-8B-Instruct-mntp/
<BridgeRoot>/text-encoders/McGill-NLP/LLM2Vec-Meta-Llama-3-8B-Instruct-mntp-adapter/
<BridgeRoot>/text-encoders/McGill-NLP/LLM2Vec-Meta-Llama-3-8B-Instruct-mntp-supervised/
Example manual download commands:
hf download meta-llama/Meta-Llama-3-8B-Instruct --local-dir text-encoders/McGill-NLP/LLM2Vec-Meta-Llama-3-8B-Instruct-mntp
hf download McGill-NLP/LLM2Vec-Meta-Llama-3-8B-Instruct-mntp --local-dir text-encoders/McGill-NLP/LLM2Vec-Meta-Llama-3-8B-Instruct-mntp-adapter
hf download McGill-NLP/LLM2Vec-Meta-Llama-3-8B-Instruct-mntp-supervised --local-dir text-encoders/McGill-NLP/LLM2Vec-Meta-Llama-3-8B-Instruct-mntp-supervised
The LLM2Vec-Meta-Llama-3-8B-Instruct-mntp local folder should include the gated raw Meta Llama files such as model.safetensors.index.json and shard files. The ...-mntp-adapter and ...-mntp-supervised folders are LoRA adapters and should include adapter_model.safetensors and adapter_config.json.
The McGill-NLP/LLM2Vec-Meta-Llama-3-8B-Instruct-mntp page may look small in the Hugging Face file browser because it is the MNTP adapter, not the full 8B base model. The full 8B shard files come from the gated meta-llama/Meta-Llama-3-8B-Instruct repository.
Do not download a separate McGill-NLP/LLM2Vec-Meta-Llama-3-8B-Instruct-mntp-adapter repository. The recommended local folder is named LLM2Vec-Meta-Llama-3-8B-Instruct-mntp-adapter only to make its runtime role clear. Its source is McGill-NLP/LLM2Vec-Meta-Llama-3-8B-Instruct-mntp.
Runtime loading order:
- Load raw
meta-llama/Meta-Llama-3-8B-Instructfiles from the localLLM2Vec-Meta-Llama-3-8B-Instruct-mntpfolder as the base model. - Merge the MNTP adapter from
TEXT_ENCODER_MNTP_ADAPTER_HOST; by default this is the localLLM2Vec-Meta-Llama-3-8B-Instruct-mntp-adapterfolder downloaded fromMcGill-NLP/LLM2Vec-Meta-Llama-3-8B-Instruct-mntp. - Apply
McGill-NLP/LLM2Vec-Meta-Llama-3-8B-Instruct-mntp-supervisedas the final supervised adapter exposed by thetext-encoderservice.
Configure .env
From <BridgeRoot>, copy the example file:
Copy-Item .env.example .env
Then edit .env for your machine. Use forward slashes in Windows paths for Docker volume mapping.
HF_HOME_HOST=./.cache/huggingface
HOST_USER=<your-windows-user-name>
SERVER_PORT=7860
TEXT_ENCODER_DEVICE=auto
TEXT_ENCODER_BASE_MODEL_HOST=./text-encoders/McGill-NLP/LLM2Vec-Meta-Llama-3-8B-Instruct-mntp
TEXT_ENCODER_MNTP_ADAPTER_HOST=./text-encoders/McGill-NLP/LLM2Vec-Meta-Llama-3-8B-Instruct-mntp-adapter
TEXT_ENCODER_ADAPTER_HOST=./text-encoders/McGill-NLP/LLM2Vec-Meta-Llama-3-8B-Instruct-mntp-supervised
UE_BRIDGE_HOST_PORT=18027
KIMODO_OUTPUT_HOST=D:/EmbodiedSpaceStudio/KimodoBridge/outputs
HF_HOME_HOST should point to the Hugging Face cache that contains the token created by hf auth login. If you prefer to keep the cache inside the bridge folder, place the token under <BridgeRoot>/.cache/huggingface/token and use HF_HOME_HOST=./.cache/huggingface.
KIMODO_OUTPUT_HOST is the host folder where generated motion.npz, ue_preview_manifest.json, logs, diagnostics, and prompt metadata are written. The packaged start script resolves KIMODO_OUTPUT_HOST=./outputs to an absolute bridge-local path automatically. If you run raw docker compose commands, set KIMODO_OUTPUT_HOST to an absolute Windows path so Unreal can open generated results.
TEXT_ENCODER_DEVICE is a Docker startup-level setting for the text-encoder service:
TEXT_ENCODER_DEVICE=auto
TEXT_ENCODER_DEVICE=cuda
TEXT_ENCODER_DEVICE=cpu
Use auto for CUDA when available with CPU fallback, cuda to force GPU, or cpu to force CPU text encoding. Use cuda, not gpu; Kimodo passes this value to PyTorch device selection.
Start the Unreal bridge runtime
From PowerShell:
cd "<BridgeRoot>"
.\scripts\Start-EmbodiedSpaceStudio-Bridge.ps1 -Build
This builds the image if needed, starts text-encoder and ue-bridge in detached mode, and prints the bridge health/model URLs plus the host output directory.
After the first build, start without rebuilding:
.\scripts\Start-EmbodiedSpaceStudio-Bridge.ps1
To also start the optional Kimodo demo service:
.\scripts\Start-EmbodiedSpaceStudio-Bridge.ps1 -WithDemo
Equivalent Docker Compose commands:
docker compose build
docker compose up -d text-encoder ue-bridge
To start the optional demo with raw Docker Compose:
docker compose up -d demo
Connect from Unreal Engine
Open any Unreal project that has the Embodied Space Studio / KimodoMotionAuthoring plugin installed. In the plugin's Docker bridge settings or Generate tab, connect to:
http://127.0.0.1:18027/bridge/v1
The Docker bridge is independent from the UE project folder. Multiple compatible UE projects can use the same local bridge by connecting to the same endpoint.
Apply .env changes and recreate containers
Docker reads environment variables when a container is created. If you edit .env, especially TEXT_ENCODER_DEVICE, model paths, ports, or KIMODO_OUTPUT_HOST, simply clicking Stop/Start or Restart in Docker Desktop can keep the old container configuration and the old value.
After changing .env, run:
cd "<BridgeRoot>"
docker compose up -d --force-recreate --no-build text-encoder ue-bridge
Use --build only when the Docker image itself needs to be rebuilt, such as after changing Dockerfile, docker_requirements.txt, ue_bridge_service, or dependency files:
cd "<BridgeRoot>"
docker compose up -d --build --force-recreate text-encoder ue-bridge
Verify the active device setting inside the recreated container:
docker exec text-encoder python -c "import os; print(os.environ.get('TEXT_ENCODER_DEVICE'))"
Verify the runtime
Run the packaged verification script:
cd "<BridgeRoot>"
.\scripts\Verify-EmbodiedSpaceStudio-Bridge.ps1
A healthy bridge should respond at:
http://127.0.0.1:18027/bridge/v1/health
http://127.0.0.1:18027/bridge/v1/models
The expected model key for this packaged setup is:
kimodo-soma-rp-v1.1
You can also inspect the containers directly:
docker ps --filter "name=text-encoder"
docker ps --filter "name=ue-bridge"
cd "<BridgeRoot>"
docker compose logs -f ue-bridge
Stop or reset the runtime
To stop the services while keeping containers available for a faster restart:
cd "<BridgeRoot>"
.\scripts\Stop-EmbodiedSpaceStudio-Bridge.ps1
To remove the compose containers completely:
.\scripts\Stop-EmbodiedSpaceStudio-Bridge.ps1 -RemoveContainers
If Unreal Engine cannot connect from the Generate tab, first check http://127.0.0.1:18027/bridge/v1/health, then confirm that Docker Desktop is running and that text-encoder and ue-bridge are active. The Unreal plugin's Connect Docker Bridge button is intended to connect to the same local bridge endpoint expected by these scripts.
User Manual
- Generate
- Preview / Level Target / Timeline
- Constraints
- Load/Save
- Visualize
- Export
- Batch
- Misc
Purpose
Connect Unreal Editor to the Kimodo runtime, choose the active generation model and source character, configure sampling/postprocess settings, and submit the current Timeline prompts plus native or external constraints for motion generation.
Action Buttons
- Generate / Generating submits the current request. The button is enabled only when the bridge is healthy, a model is loaded, there is valid prompt content, and the service is not busy.
- Stop Compute asks the bridge/runtime to stop the active compute job without resetting all editor state.
- Connect Docker Bridge and Disconnect start or stop the local bridge service. Refresh Health rechecks service health, and Reset clears editor authoring state and preview state.
Runtime Output
- Output Name Prefix is used when naming generated job outputs and follow-up assets.
- Text Encoder Device is configured in Docker, not per Generate request. Edit
TEXT_ENCODER_DEVICEinKimodoBridge/.env, then recreatetext-encoderandue-bridgewithdocker compose up -d --force-recreate --no-build text-encoder ue-bridge. - Runtime Log records user-facing Generate/Export/Batch actions. Copy Log sends it to the clipboard; Clear removes the local display text.
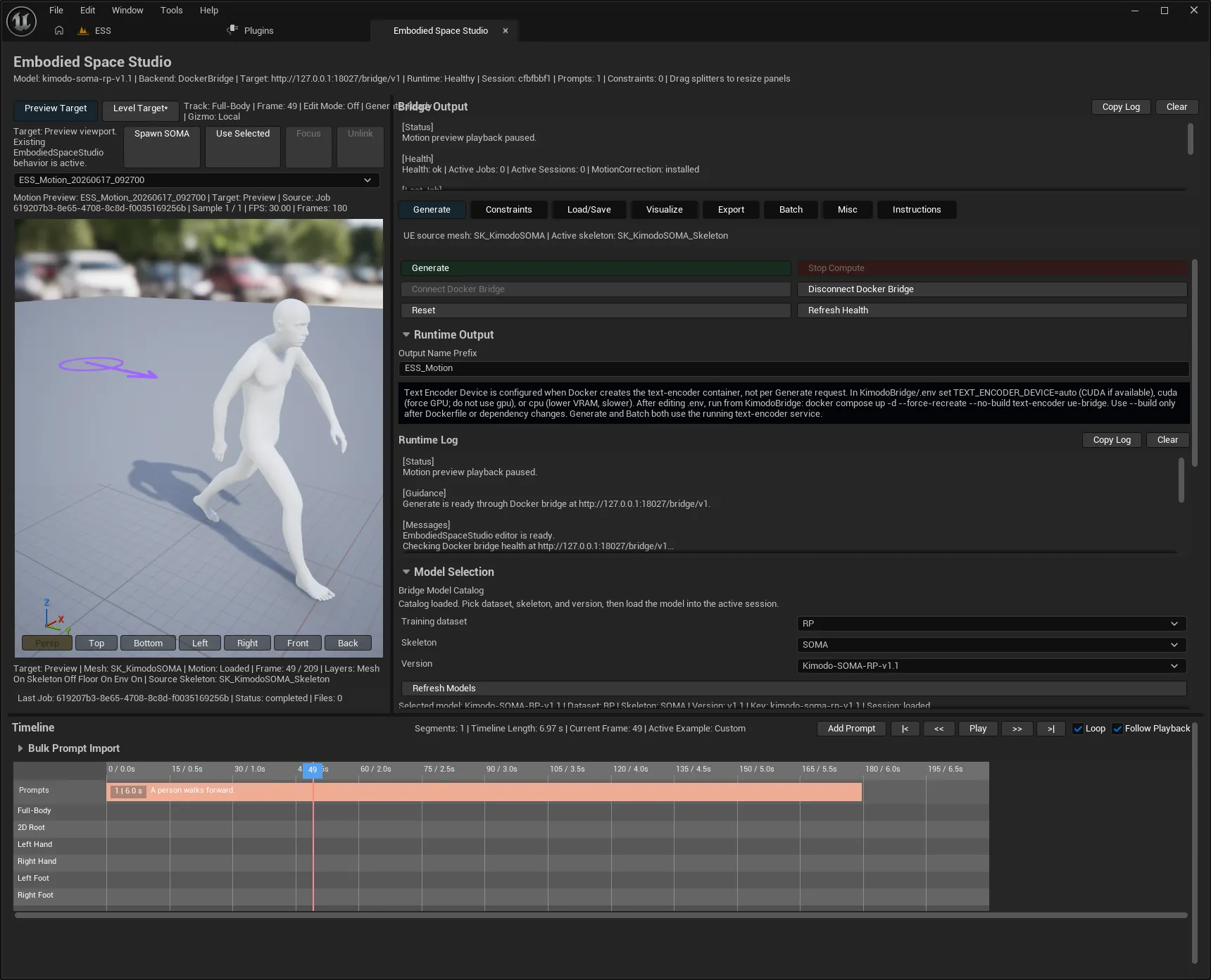
Model Selection
- Refresh Models queries the bridge model catalog.
- Training dataset, Skeleton, and Version filter the model list. Load model makes that model active in the current bridge session.
- The selected model summary explains whether the model is loaded, unavailable, or waiting on service health.
Kimodo Mesh / Skeleton
- Kimodo Source Preview Mesh overrides the source mesh used for preview binding and request metadata.
- Source Skeleton Override can provide a skeleton when a mesh is not enough or when a specific binding is required.
- Reset To SOMA Default clears custom source selections and returns to the default Kimodo/SOMA source character.
Generate Settings
- Num Samples controls how many candidates the runtime returns for the same authored prompt/constraint request.
- Seed becomes active when edited and is used for reproducible generation.
- Denoising Steps controls diffusion refinement cost and quality.
- Reduce Foot Sliding enables runtime foot-contact stabilization. Level 1 is lighter; Level 2 adds stable curves and XY foot lock.
- Classifier-Free Guidance balances Text Weight and Constraint Weight when CFG is enabled.
- Transition Frames controls blending between adjacent prompt segments.
- Post Processing toggles runtime postprocess, and Root Margin adjusts the root-trajectory margin used by that postprocess.
Recommended Workflow
First author prompts in the Timeline, then add constraints if needed, confirm the bridge health and loaded model, generate one sample set, and inspect it in Preview or Level Target before exporting or batching.
Purpose
The main panel outside the sidebar is where generated motion is viewed, scrubbed, and edited against prompts and constraints. It is also where users choose whether edits happen inside the embedded Preview viewport or directly in the main Unreal Level viewport.
Preview Header
- Preview Target uses the embedded preview viewport. It is the quickest place to inspect a generated sample without spawning level actors.
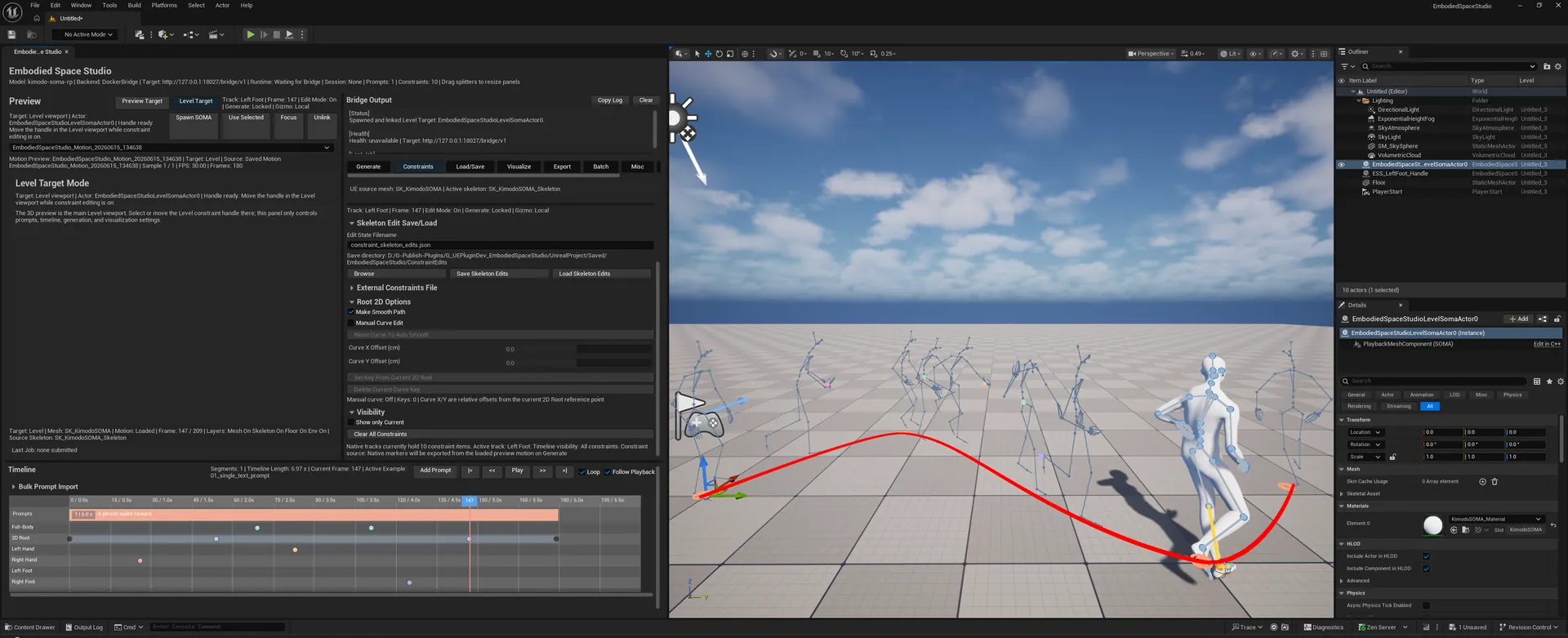
- Level Target switches authoring to the main Level viewport. The preview area shows Level Target Mode text while the actual mesh and constraint handle live in the Level viewport.
- Spawn SOMA creates a new EmbodiedSpaceStudio SOMA Level Target in the current level, binds it, loads the active preview mesh/clip, moves the viewport camera to it, and activates Level Target mode.
- Use Selected binds the selected EmbodiedSpaceStudio SOMA Level Target, or a selected Actor with a SkeletalMeshComponent, as the Level Target.
- Focus moves editor viewport cameras to the bound Level Target. Unlink detaches the panel from the current Level Target and returns to an unbound Level Target state.
- The constraint editing state text shows whether editing mode is active and which target is receiving constraint edits.
Embedded Preview Viewport
- Persp, Top, Bottom, Left, Right, Front, and Back switch the embedded viewport camera view.
- The motion sample selector chooses among generated samples from the loaded preview manifest.
- Motion Preview summary reports clip name, active target, source, sample count, FPS, and frame count.
- Last Job / status text reports the latest bridge job and generated output state.
Level Target Editing
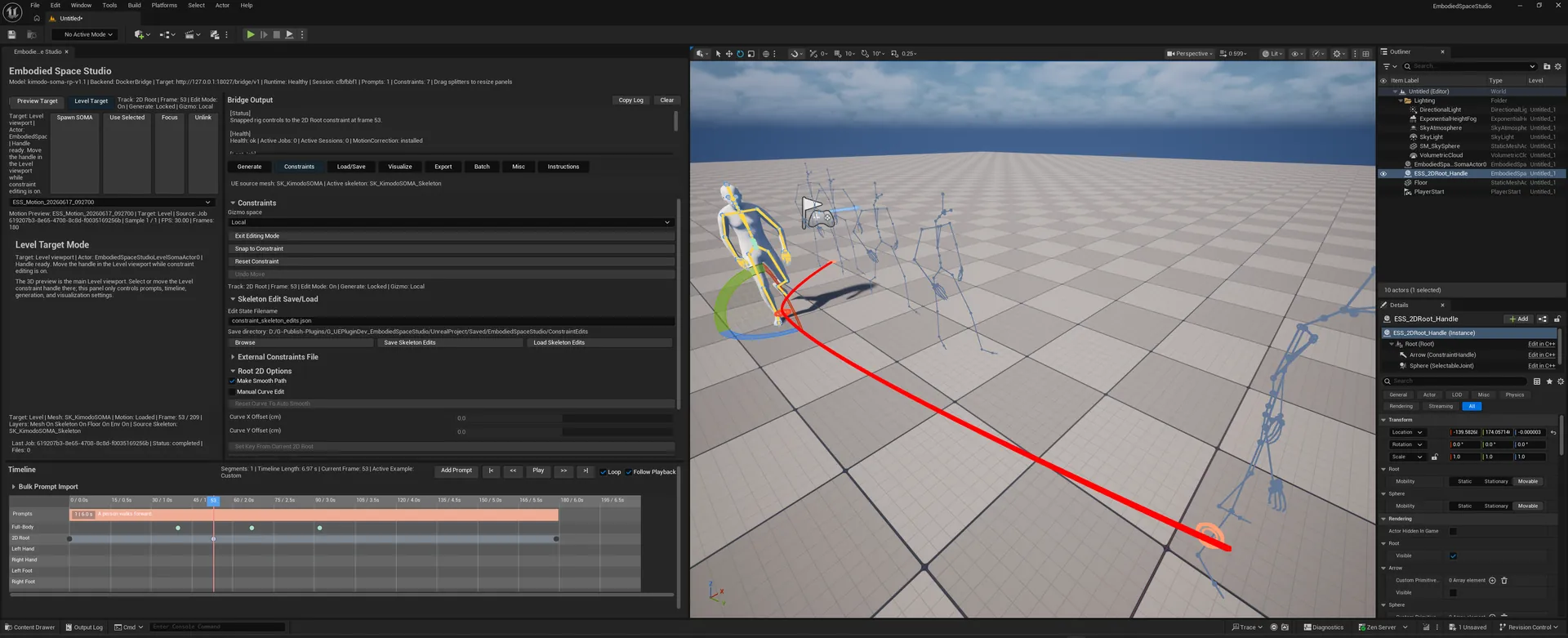
- In Level Target mode, select and move the Level constraint handle in the main Level viewport while prompt, timeline, generation, and visualization controls remain in this panel.
- The Level Target receives the same preview mesh, active sample, playback frame, root path preview, and constraint markers as the embedded preview.
- Holding Shift while using the Level Target edit widget switches to rotation behavior, mirroring the Preview Target constraint editing behavior.
Timeline Top Bar
- Add Prompt adds a new prompt segment.
|<and>|jump to first/last frame;<<and>>step backward/forward; Play/Pause controls motion playback.- Loop repeats playback. Follow Playback keeps the Timeline scrolled near the current playback frame.
- Bulk Prompt Import accepts numbered prompt text such as
1[8]. text. Replace Timeline Prompts converts it into timed prompt segments; Clear Timeline Prompts removes all prompt segments; Clear Bulk Prompt Text clears only the import box.
Timeline Mouse / Keyboard Operations
- Click or drag on the ruler to scrub Current Frame. Shift + mouse wheel zooms Timeline pixels-per-frame.
- In the prompt row, left-click creates or selects a prompt; drag inside a prompt moves it; drag an edge resizes it; right-click deletes it; double-click edits text. Enter commits inline text edits and Escape cancels them.
- Prompt moves and resizes snap to neighboring prompt boundaries, while respecting minimum and maximum prompt duration.
- Constraint rows are Full-Body, 2D Root, Left Hand, Right Hand, Left Foot, and Right Foot. Left-click creates/selects a key; drag moves a range; drag edges resize a range; Ctrl/Command/Shift-drag creates an interval; right-click deletes where supported.
- Constraint ranges carry edited joint transforms with them when moved, and remove out-of-range per-frame edits when resized.
Recommended Workflow
Author prompt timing first, generate or load a preview, use playback to find important frames, then switch on constraint editing and add precise constraint keys or ranges where the motion needs correction.
Purpose
Create, edit, save, load, and filter native Timeline constraints and optional external constraints.json input so the generated motion respects authored body poses, hand/foot placement, and 2D root path intent.
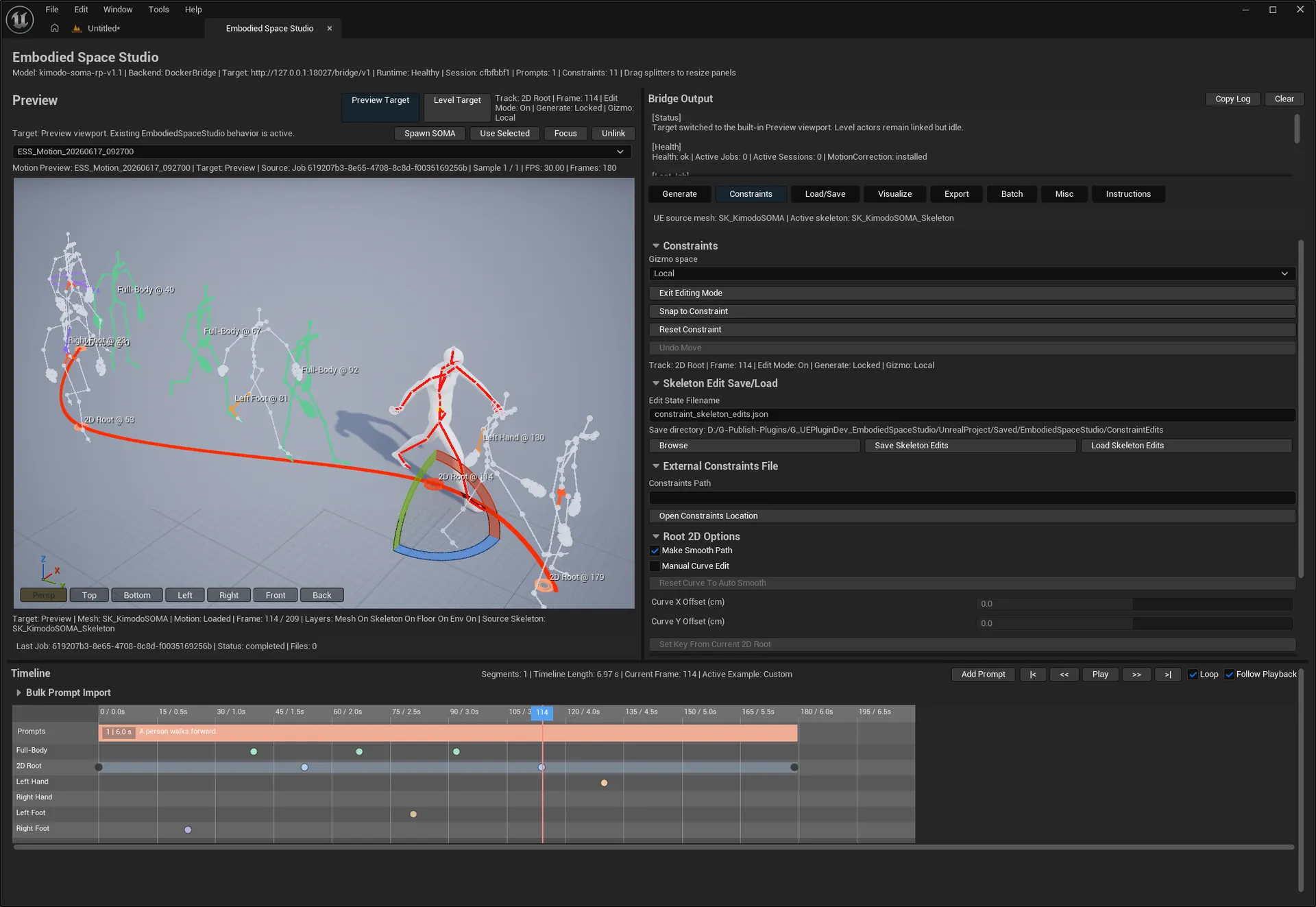
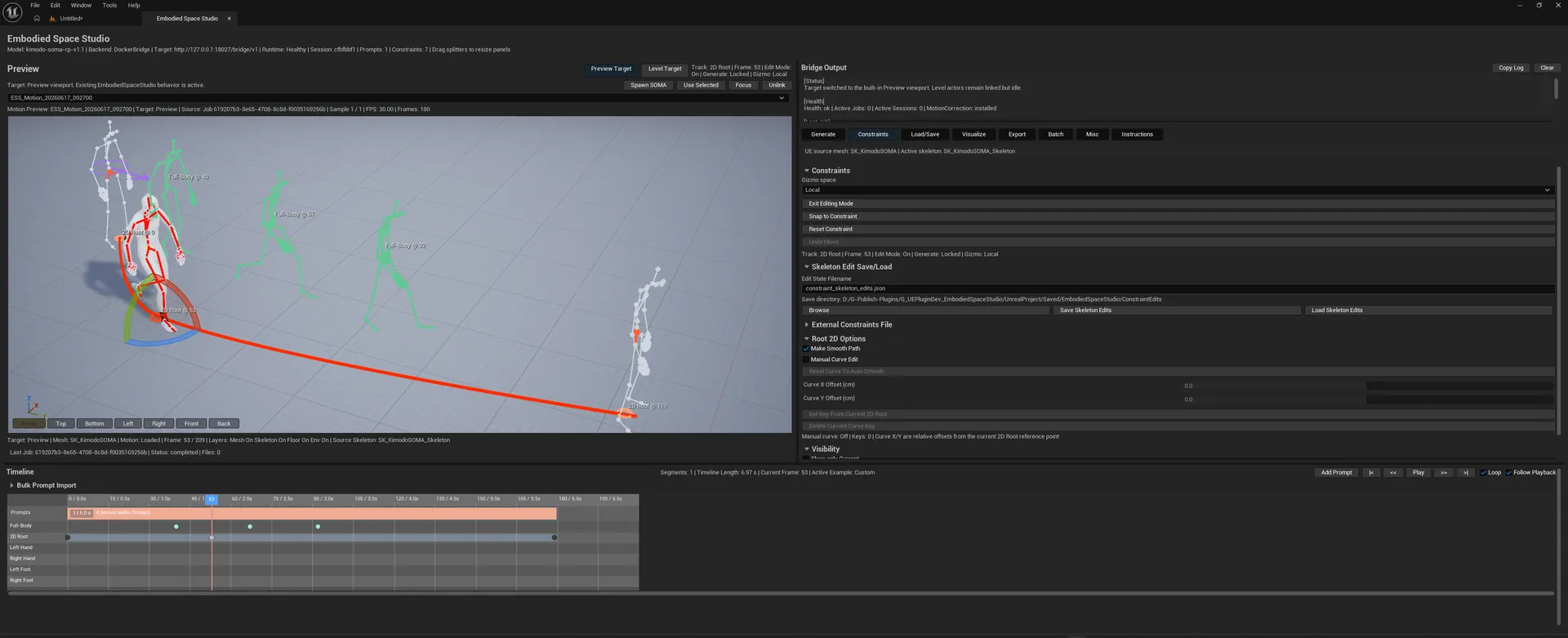
Constraints Section
- Gizmo space selects how the live edit handle interprets movement while constraint editing is active.
- Enter Editing Mode / Exit Editing Mode toggles live rig editing. While editing is active, Generate is intentionally blocked and the Preview or Level Target exposes constraint handles.
- Snap to Constraint moves the current frame preview/edit target onto the active constraint on the selected track.
- Reset Constraint clears the active edited transform for the selected/current constraint. Undo Move is currently reserved and disabled in the UI.
- The state summary reports active target, selected track, editing status, and current frame context.
Skeleton Edit Save/Load
- Edit State Filename names a saved skeleton edit state under the default constraints edit directory.
- Browse selects an edit-state filename. Save Skeleton Edits writes current native constraints and edited joint transforms. Load Skeleton Edits restores them.
External Constraints File
- Constraints Path can point at an external
constraints.jsonfile. - Open Constraints Location opens the folder for the current constraints path.
- Native Timeline constraints are preferred when authored; an external path is useful for legacy files, imported examples, or generation requests that should use a prebuilt
constraints.json.
Root 2D Options
- Make Smooth Path densifies/smooths the 2D Root path from authored 2D Root constraints.
- Manual Curve Edit enables
FRichCurveX/Y offsets relative to the current 2D Root reference path. - Reset Curve To Auto Smooth discards manual offsets and rebuilds from the automatic smoothed path.
- Curve X Offset and Curve Y Offset edit the current frame's manual offset when a valid manual curve exists.
- Set Key From Current 2D Root writes a manual curve key from the current preview/root position. Delete Current Curve Key removes the current frame's manual root key.
- The manual curve status line reports whether manual edit is active, whether enough 2D Root points exist for Generate, and how many keys are stored.
Visibility
- Show only Current filters constraint markers to the current frame.
- Clear All Constraints removes all native Timeline constraints.
Recommended Workflow
Load or generate a preview, scrub to the frame, enable editing, choose Full-Body/2D Root/hand/foot track in the Timeline, create or select a constraint key, move the handle, save edits if they should be reused, then exit editing before generating.
Purpose
Reopen generated motion previews, save reusable example metadata, and inspect generated output folders without running generation again.
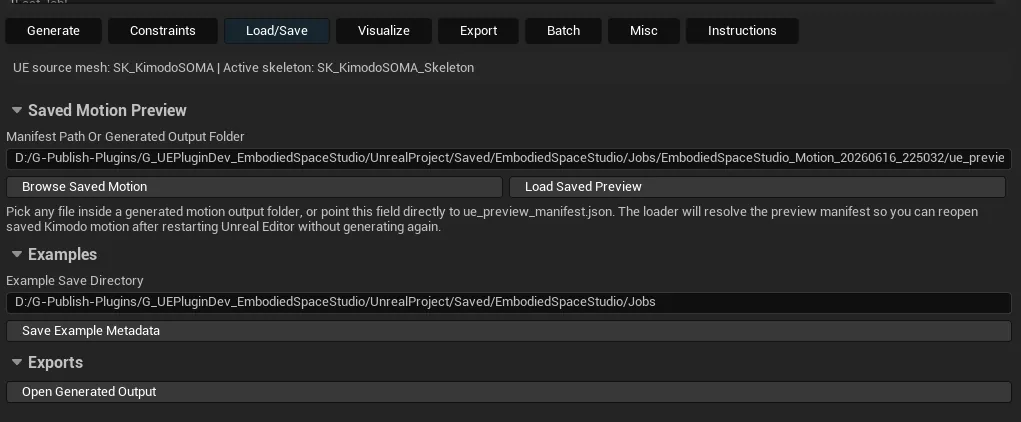
Saved Motion Preview
- Manifest Path Or Generated Output Folder can point directly to
ue_preview_manifest.json, to the generated output folder that contains it, or to any file inside that output folder. - Browse Saved Motion opens a file picker and stores the selected path in the field.
- Load Saved Preview resolves the manifest path, parses the preview data, restores motion samples, reloads prompt timeline metadata when available, and updates the active Preview/Level Target.
- Use this when reopening previous jobs after restarting Unreal Editor or when reviewing batch-generated outputs.
Examples
- Example Save Directory sets where reusable example metadata is written.
- Save Example Metadata captures current prompt segments, constraints, source character context, constraints path, and related preview metadata so a setup can be loaded again as an example.
Exports
- Open Generated Output opens the latest generated output folder reported by the bridge, where
motion.npz,ue_preview_manifest.json, constraints files, prompt metadata, and diagnostics live.
Recommended Workflow
Load saved preview manifests for review, save example metadata for prompt/constraint templates, and open the generated output folder when validating files before export or batch packaging.
Purpose
Adjust playback, visual overlays, camera display, and Timeline/interface visibility. These settings help inspect motion and constraints without changing the generated motion data.
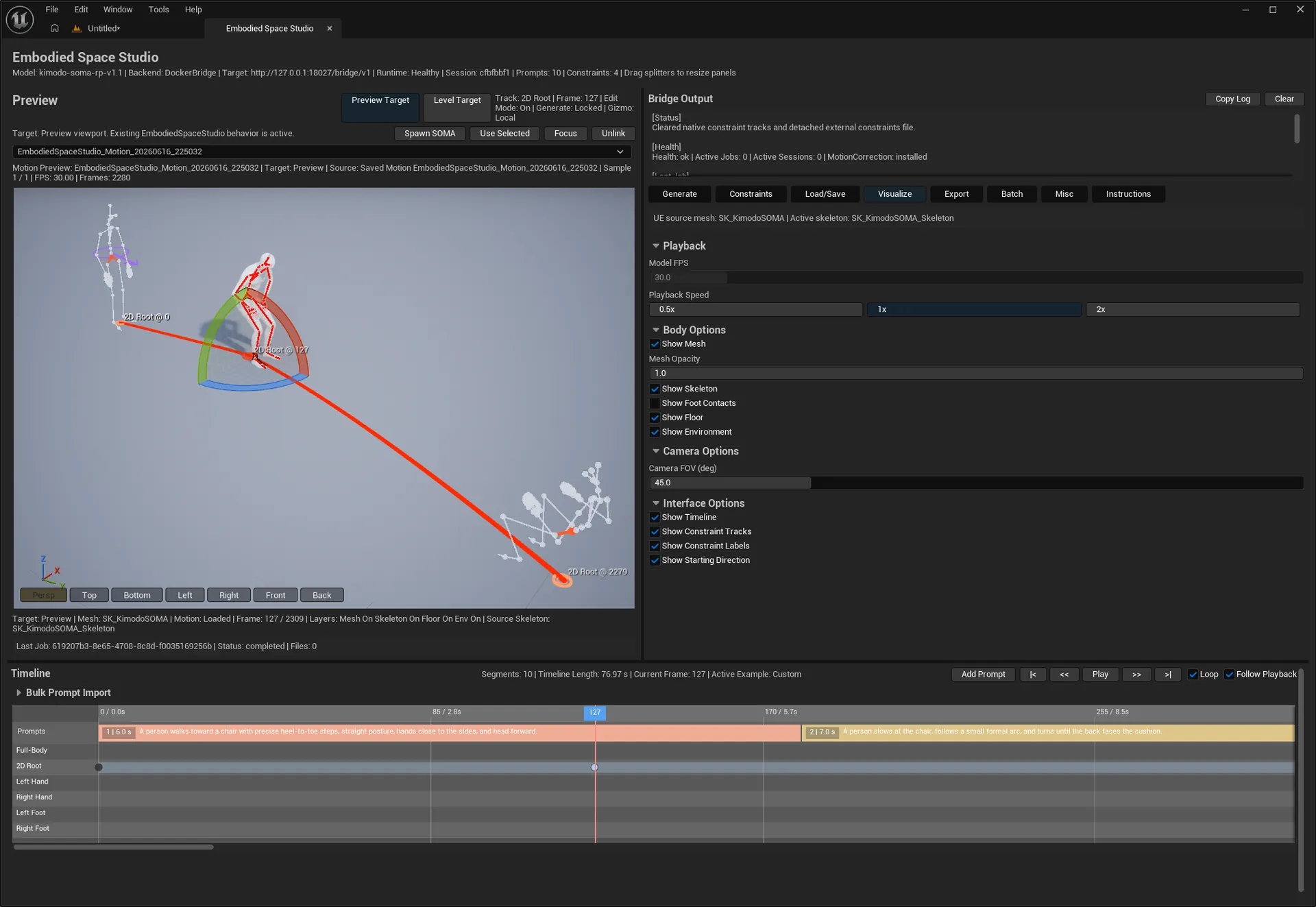
Playback
- Model FPS displays the active clip's FPS when a preview is loaded, otherwise the configured default. It is read-only in the current UI.
- Playback Speed switches preview playback between 0.5x, 1x, and 2x.
- The Timeline playback buttons, sample selector, Loop, and Follow Playback use this playback state.
Body Options
- Show Mesh toggles the skinned preview mesh. Mesh Opacity makes the mesh transparent for checking skeleton, constraints, and floor contact.
- Show Skeleton displays the skeleton overlay. Show Foot Contacts is enabled only when skeleton display is active and shows contact markers/foot-contact state from the loaded clip.
- Show Floor and Show Environment control the embedded preview scene floor and environment. In Level Target mode, related display options are synced to the Level Target actor when possible.
Camera Options
- Camera FOV adjusts the embedded preview camera field of view. The Preview viewport view buttons still choose perspective or orthographic directions.
Interface Options
- Show Timeline shows or hides the bottom Timeline.
- Show Constraint Tracks toggles constraint rows in the Timeline. Show Constraint Labels toggles labels for constraint markers.
- Show Starting Direction displays the starting direction reference for previewed motion.
- Dark Mode toggles dark presentation styling where the UI supports it.
Recommended Workflow
After generation, inspect the mesh first, then enable skeleton and foot contacts for debugging, lower opacity when checking intersections, and use floor/environment/FOV settings to judge grounding and readability.
Purpose
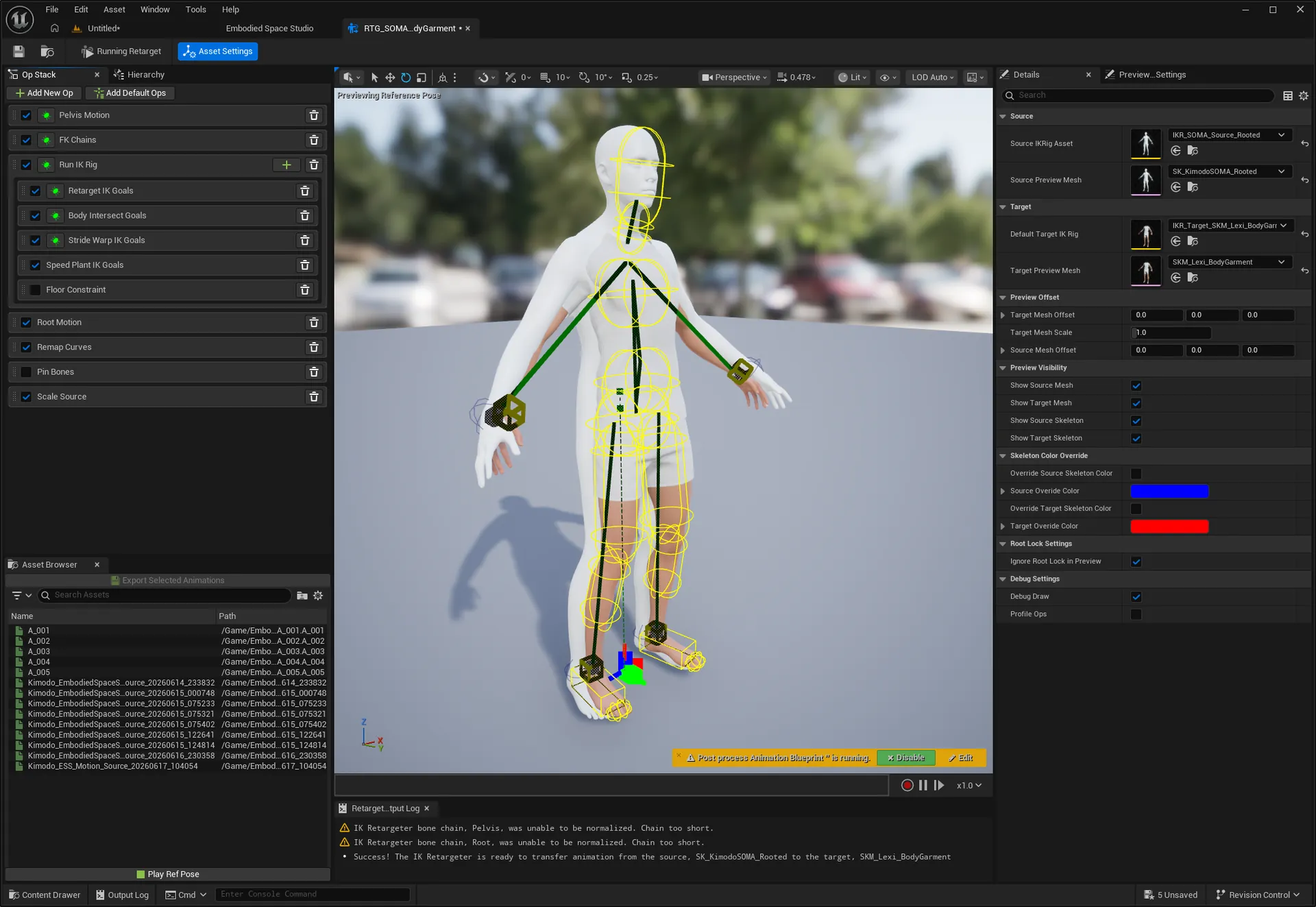
Convert the active Kimodo preview clip into Unreal assets. Export can bake a SOMA Animation Sequence directly, or retarget the motion through IK Rig / IK Retargeter assets to Manny, Quinn, MetaHuman, or a custom target character.
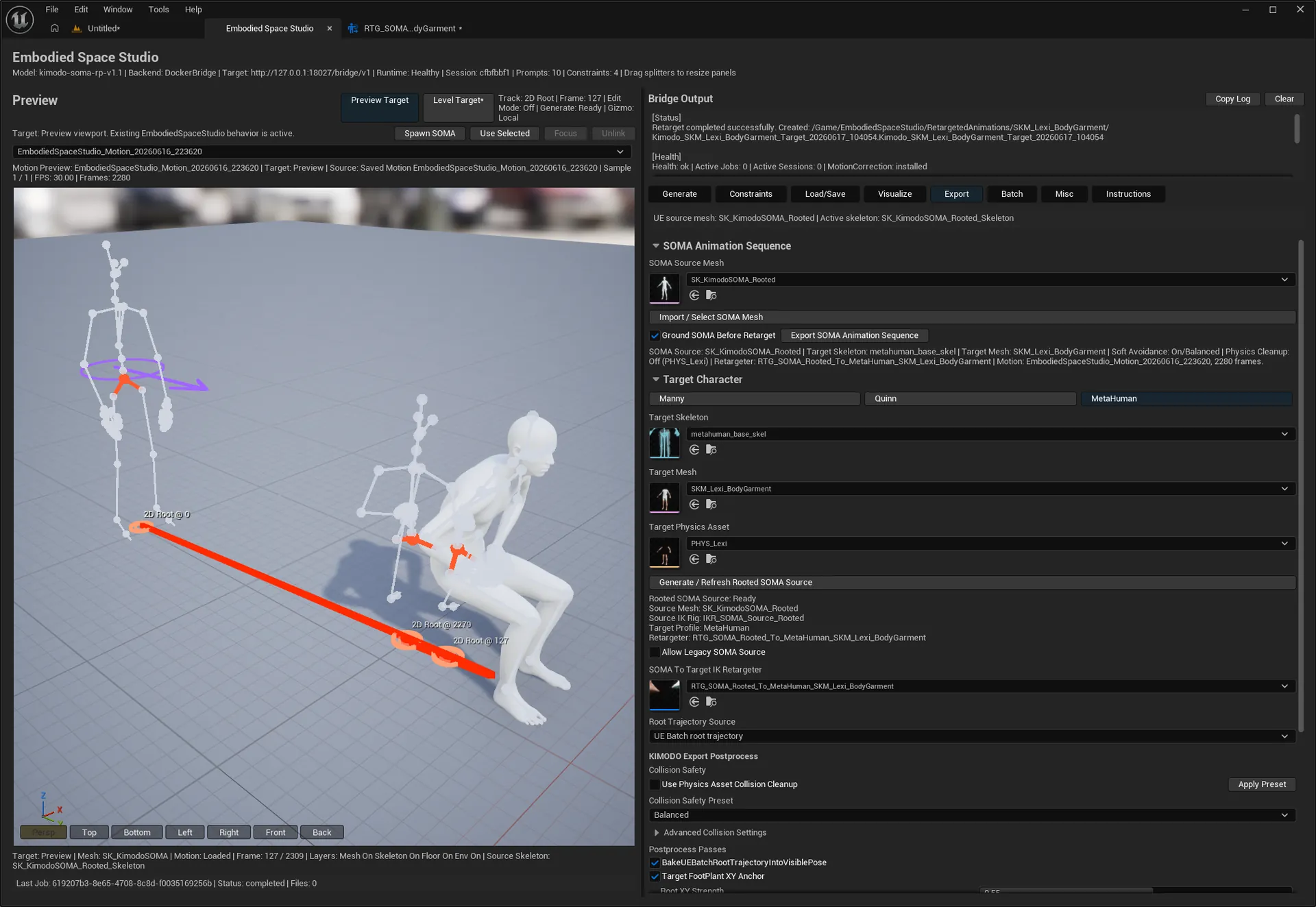
SOMA Animation Sequence
- SOMA Source Mesh selects the mesh used when baking the Kimodo/SOMA source animation.
- Import / Select SOMA Mesh imports or selects the bundled/default SOMA source mesh asset.
- Ground SOMA Before Retarget grounds the SOMA source animation before it is used as retarget source data.
- Export SOMA Animation Sequence writes the active preview clip to a UE AnimSequence for the selected SOMA source mesh.
- The retargeting summary reports active source/target readiness and why export buttons may be disabled.
Target Character
- Manny, Quinn, and MetaHuman preset buttons switch the active target profile and restore profile-specific mesh, skeleton, physics, retargeter, and runtime postprocess settings where saved.
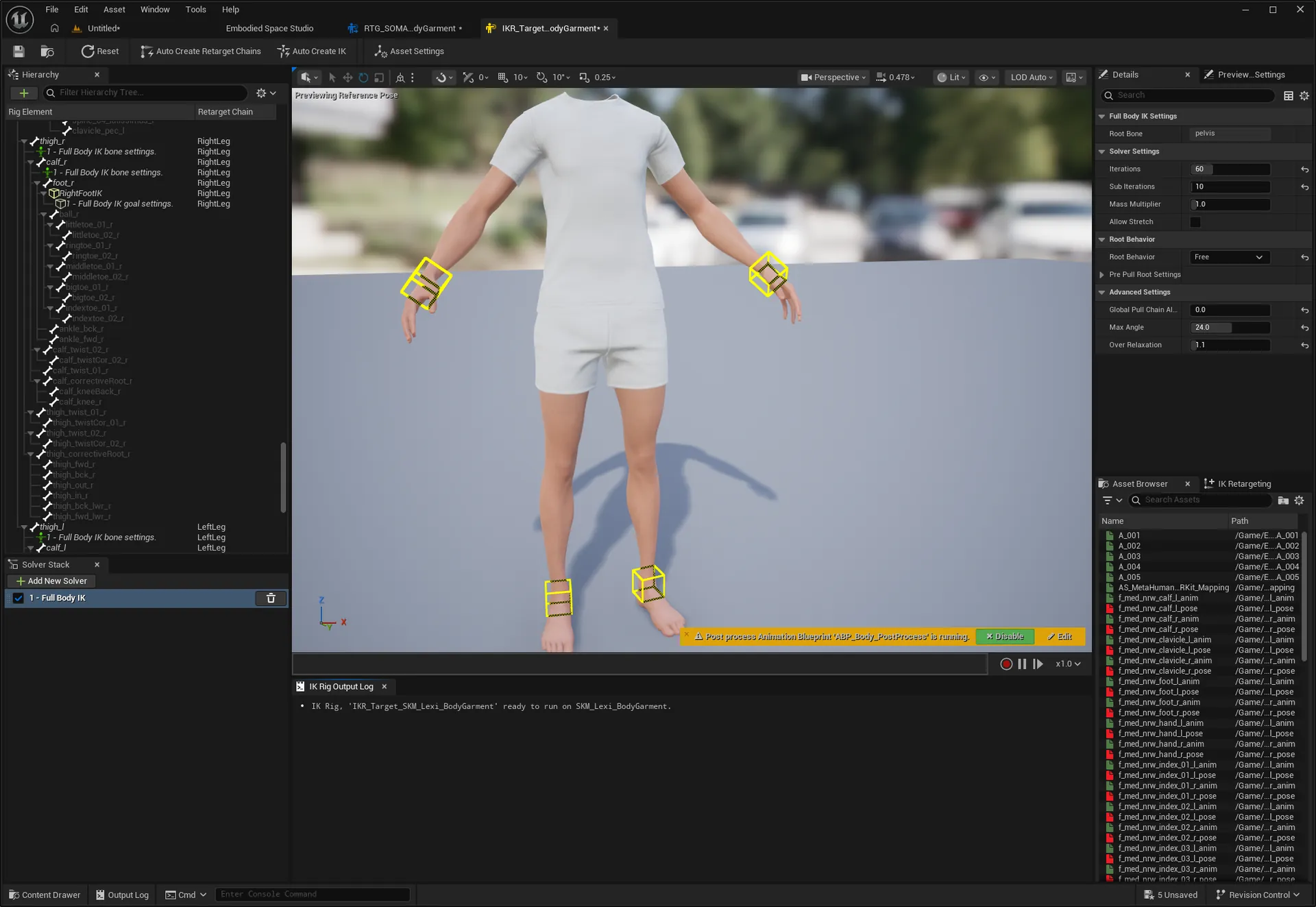
- Target Skeleton, Target Mesh, and Target Physics Asset choose the destination skeleton/mesh/collision assets. Compatible meshes or physics assets may be auto-filled from the selected skeleton or mesh.
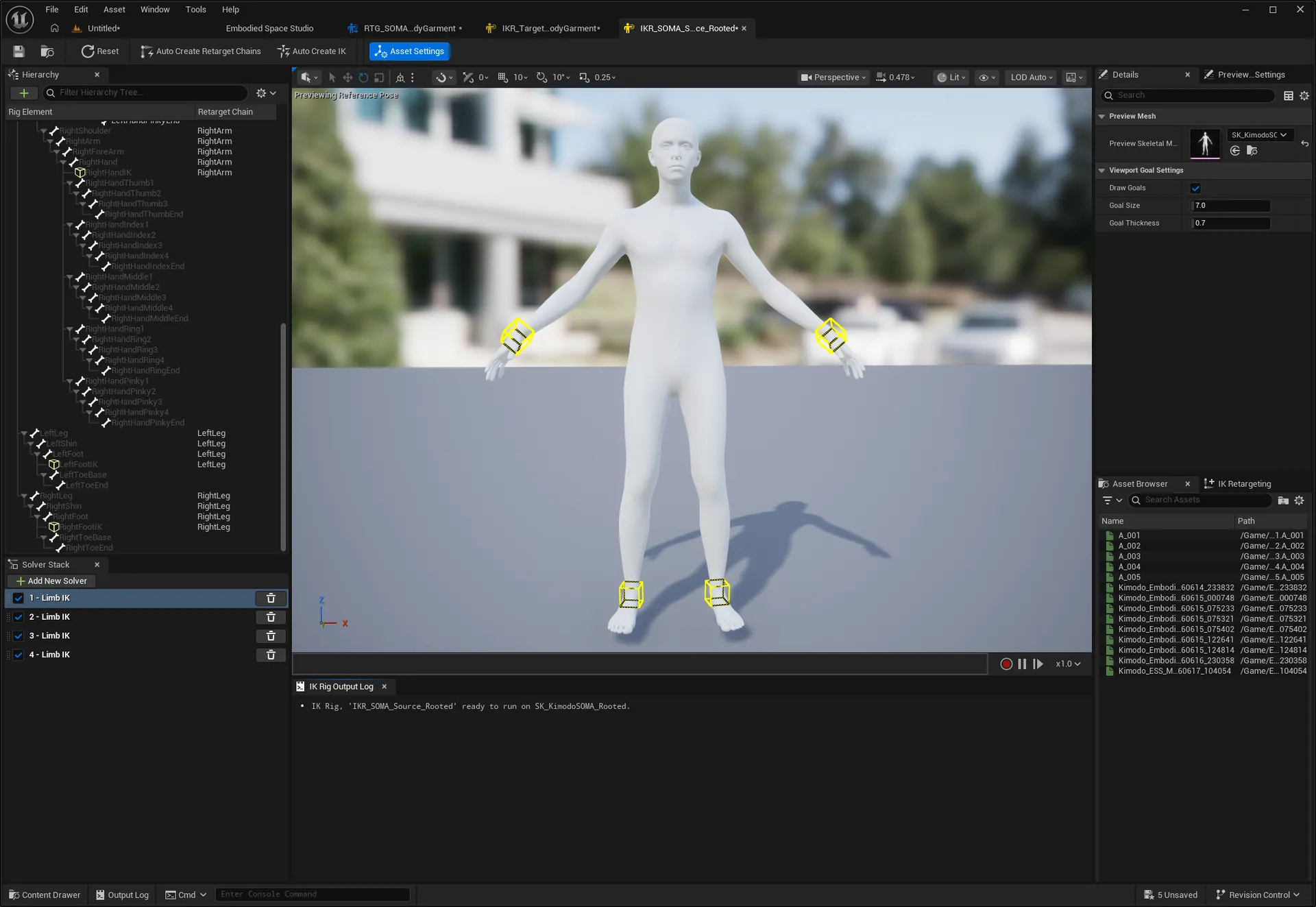
- Generate / Refresh Rooted SOMA Source selects/imports
SK_KimodoSOMA_Rooted, refreshes the SOMA source IKRig, and rebuilds rooted SOMA retarget assets for the current target. - Allow Legacy SOMA Source exists for legacy fallback/debugging. Normal production export should use the rooted SOMA source.
- SOMA To Target IK Retargeter selects the authored/generated RTG used by Export Target Animation Sequence.
- Root Trajectory Source chooses whether target export follows UE Batch root trajectory or KIMODO/SOMA smooth root trajectory where supported. Rooted SOMA rejects unsupported KIMODO smooth-root fallback and prefers UE Batch validation.
KIMODO Export Postprocess
- Use Physics Asset Collision Cleanup enables target Physics Asset based clearance cleanup. Apply Preset recommends collision safety settings for the selected target.
- Collision Safety Preset chooses a saved preset. Advanced Collision Settings expose Clearance Margin, Max Limb Correction, and Solver Iterations.
- Postprocess Passes include visible controls such as Run IK Rig During Retarget and Auto Fix Foot Tilt when present in the current build.
- Target FootPlant XY Anchor controls root/IK foot anchor strength, Max IK correction, Smooth frames, Contact Threshold, and Release Threshold. It only takes effect when contact data exists.
- Additional grounding and diagnostic passes, including final visual-sole grounding and per-animation final grounding, are written into export diagnostics and applied according to the current build/runtime configuration even when their debug toggles are hidden.
Retarget Assets
- Retarget Assets Name overrides the generated IKRig/RTG asset base name; leaving it blank uses an automatic name based on the target mesh and timestamp.
- Export Retarget Assets creates or refreshes source/target IK Rig and IK Retargeter assets for the current source/target pair. Auto Search SourceScaleFactor runs a full-frame pose optimization when enabled.
- Auto Scale Loss Weights tune the optimization balance for General Pose, Special Pose, Foot Sliding, and Scale Prior. Reset Auto Scale Weights restores defaults.
- Refresh RTG From Authored IK Rig rebinds and saves the selected retargeter while preserving authored chains, goals, solvers, poses, and retarget ops.
- Export Target Animation Sequence runs the selected RTG on the active SOMA preview clip, applies export postprocess/diagnostics, saves the target AnimSequence, and copies reports next to the output package.
Recommended Workflow
Generate or load the motion, export/refresh rooted SOMA source, choose target preset/assets, export or verify the RTG, check collision and foot-anchor settings, then run Export Target Animation Sequence.
Purpose
Run production-scale generation and export. Batch can generate from a Markdown prompt file, or skip generation and export from an existing folder of completed SOMA jobs.
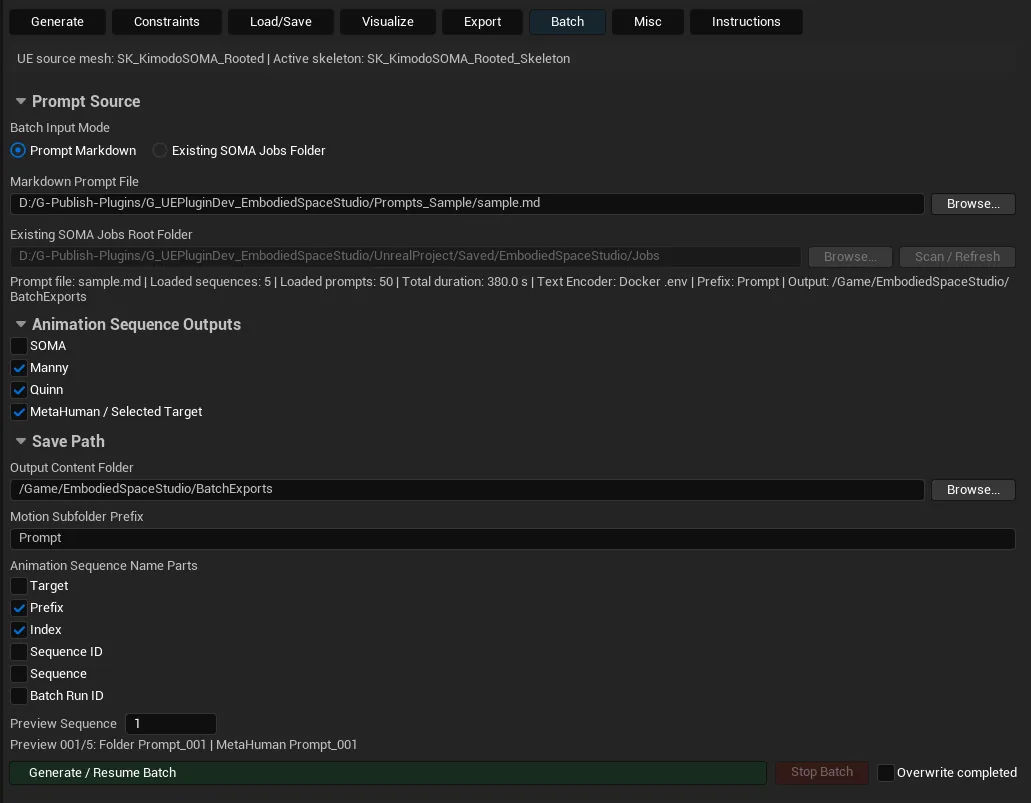
Prompt Source
- Prompt Markdown mode reads a Markdown prompt file, builds prompt sequences, submits each sequence to Generate, and exports selected target animations after each job completes.
- Existing SOMA Jobs Folder mode reads already-generated job folders and runs export/retarget only.
- Markdown Prompt File chooses the batch prompt source. Existing SOMA Jobs Root Folder chooses the root folder to scan.
- Browse... opens file/folder pickers. Scan / Refresh parses existing job folders and their
ue_preview_manifest.jsonfiles. - The batch summary reports loaded sequence/job counts and any parsing or scan status.
Animation Sequence Outputs
- SOMA exports the source SOMA AnimSequence.
- Manny and Quinn export the matching UE Mannequin targets using their configured presets.
- MetaHuman / Selected Target exports through the current MetaHuman or manually configured target settings from Export.
- Batch reuses the current Export tab target, rooted SOMA, collision, RTG, postprocess, and Ground SOMA Before Retarget state.
Save Path
- Output Content Folder must be a valid
/Gamepackage path and becomes the root for exported batch assets. - Motion Subfolder Prefix controls per-motion folder names.
- Animation Sequence Name Parts controls whether generated target animation names include Target, Prefix, Index, Sequence ID, Sequence, and Batch Run ID.
- Preview Sequence lets you inspect a representative folder and animation name for a chosen sequence number before running the batch.
Execution
- Generate / Resume Batch starts a new run or resumes a run from the tracked current sequence.
- Stop Batch requests a safe stop after the active request/export reaches an interruption point.
- Overwrite completed allows already-completed exports to be replaced instead of skipped.
- Batch tracks prompt retries, handled job IDs, existing motion export counts, skipped motions, and active job state internally.
Recommended Workflow
Validate one Generate + Export manually, then use Batch with a clean output folder. Preview names before committing, leave Overwrite completed off for resumable production, and use Existing SOMA Jobs Folder when only retarget/export needs to be repeated.
Purpose
Production utilities that do not fit a single Generate/Export run: level placement, playable MetaHuman setup, merged MetaHuman meshes, Fab package assembly, offline animation cleanup, MetaHuman Level Sequences, and prompt subtitle overlays.
Batch Level Layout
Overview: Places exported batch animations into the current level as preview actors with readable labels, so a full motion pack can be reviewed spatially.
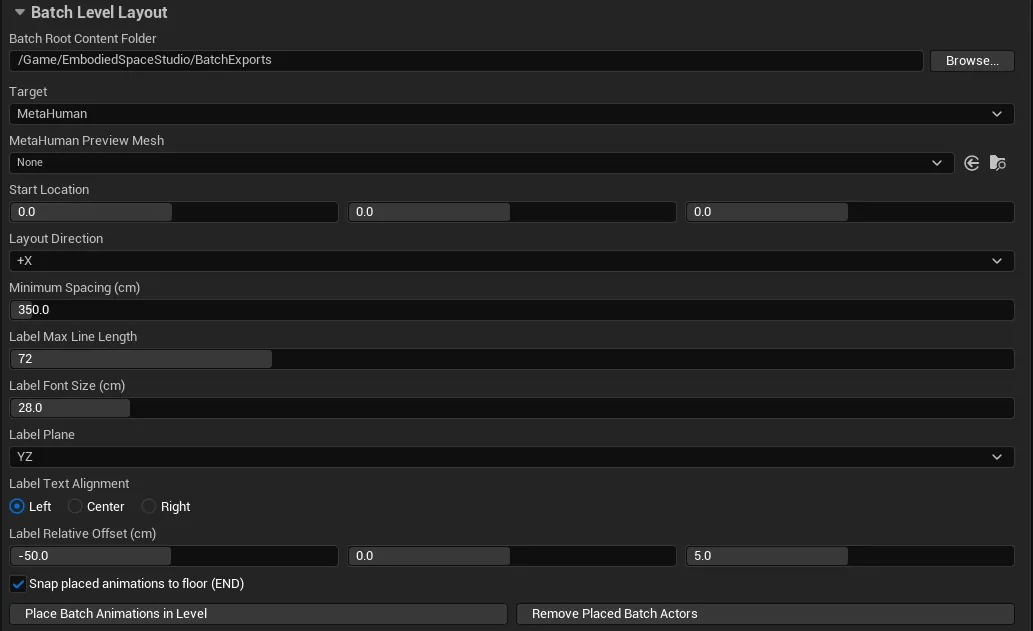
- Batch Root Content Folder selects the batch export root under
/Game, and Target chooses the exported target family to place. - MetaHuman Preview Mesh is shown only for the MetaHuman target and overrides the preview mesh used for placed MetaHuman animations.
- Start Location, Layout Direction, and Minimum Spacing (cm) define the placement line in the current level.
- Label Max Line Length, Label Font Size (cm), Label Plane, Label Text Alignment, and Label Relative Offset (cm) control the text actors placed with each animation.
- Snap placed animations to floor (END) grounds placed actors by their ending pose. Place Batch Animations in Level creates the actors/labels, and Remove Placed Batch Actors clears the tool-created actors from the current level.
MetaHuman Player Character
Overview: Creates or updates a playable character Blueprint that drives a selected MetaHuman through a project pawn class.

- Base Pawn Class chooses the pawn/character class to duplicate or create from.
- MetaHuman BP selects the MetaHuman actor blueprint to bind into a playable character.
- Output Content Folder chooses where the generated character blueprint is saved.
- Update Maps & Modes Default Pawn Class updates the project Maps & Modes default pawn to the generated character when enabled.
- Create / Update MetaHuman Player Character builds or updates the playable blueprint and saves the asset.
MetaHuman Body + Garment Mesh
Overview: Builds a single body-plus-garment Skeletal Mesh for MetaHuman animation preview/export workflows while leaving the face/head assets separate.
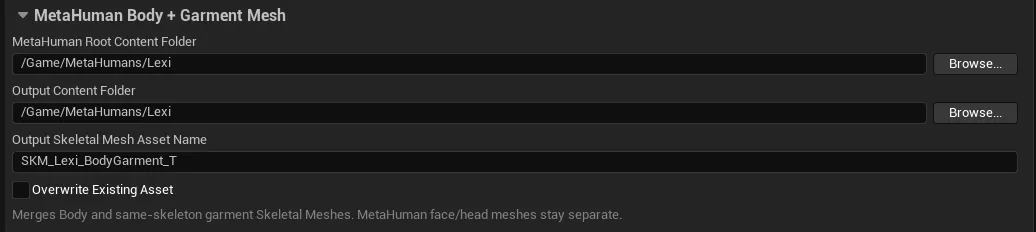
- MetaHuman Root Content Folder points to the MetaHuman asset folder to scan.
- Output Content Folder and Output Skeletal Mesh Asset Name define where the merged body + garment Skeletal Mesh is saved.
- Overwrite Existing Asset allows replacing the generated mesh. The tool merges the Body mesh and same-skeleton garment meshes; MetaHuman face/head meshes stay separate.
- Create Body + Garment Skeletal Mesh performs the merge and saves the output asset.
Fab Product Package
Overview: Assembles exported animations, demo assets, supporting files, and motion indexes into a clean product content root for Fab delivery/review.
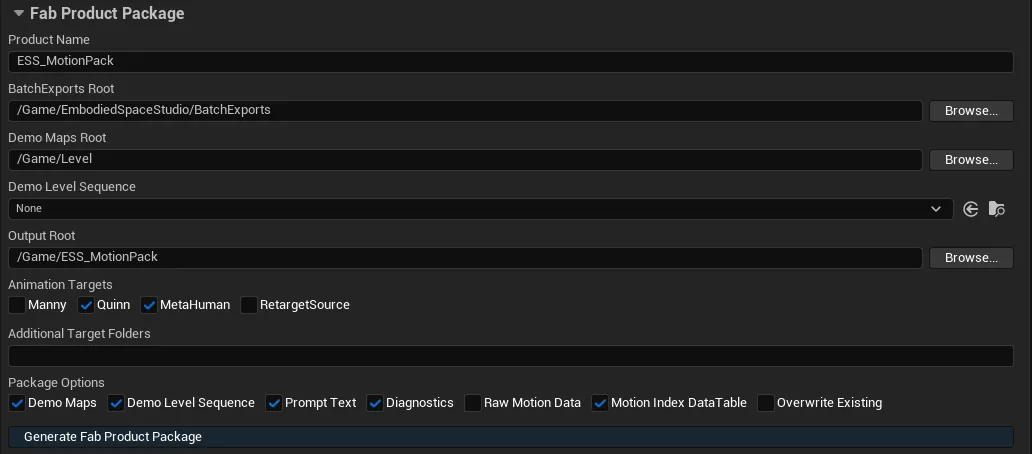
- Product Name, BatchExports Root, Demo Maps Root, Demo Level Sequence, and Output Root define the package source content and destination root.
- Animation Targets include Manny, Quinn, MetaHuman, RetargetSource, plus Additional Target Folders for extra target folders entered manually.
- Package Options include Demo Maps, Demo Level Sequence, Prompt Text, Diagnostics, Raw Motion Data, Motion Index DataTable, and Overwrite Existing.
- Generate Fab Product Package copies selected assets and dependencies, builds package docs/reports, and optionally creates the UE DataTable plus CSV/JSON motion indexes.
Soft Collision Avoidance
Overview: Applies an offline physics-asset collision clearance pass to target AnimSequences to reduce body/limb intersections after export.
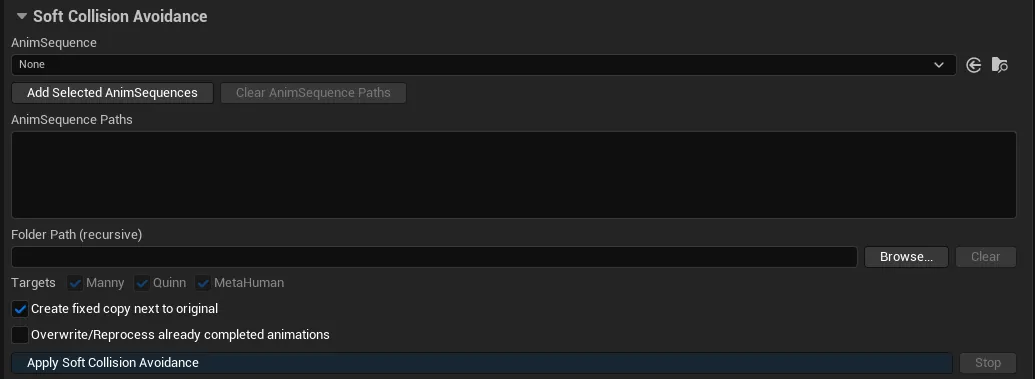
- AnimSequence selects one animation. Add Selected AnimSequences fills the multi-path list from Content Browser selections, and Clear AnimSequence Paths clears that list.
- AnimSequence Paths accepts pasted animation asset paths. Folder Path (recursive) switches to folder mode, where the single AnimSequence and pasted paths are ignored until Clear exits folder mode.
- In folder mode, Targets filters recursive processing to Manny, Quinn, and/or MetaHuman outputs.
- Create fixed copy next to original duplicates before processing. Overwrite/Reprocess already completed animations allows repeated processing. Apply Soft Collision Avoidance starts the operation, and Stop requests cancellation while the batch is active.
Self Collision Pose Fix
Overview: Re-solves target poses to push self-intersecting body parts apart, optionally using the matching SOMA source motion as a guide.
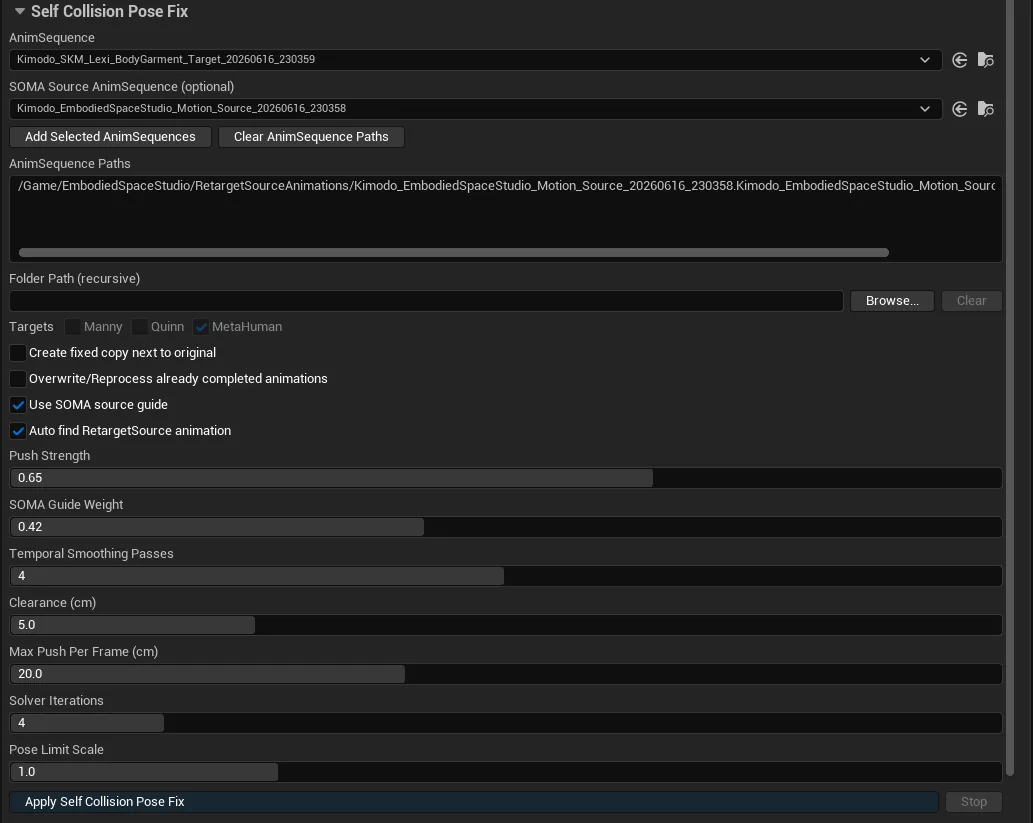
- AnimSequence, Add Selected AnimSequences, AnimSequence Paths, and Folder Path (recursive) use the same single/list/folder source workflow as Soft Collision Avoidance.
- SOMA Source AnimSequence (optional) can guide the fix outside folder mode. Use SOMA source guide enables guide influence, and Auto find RetargetSource animation resolves matching RetargetSource assets automatically; folder mode always uses per-animation auto search when the guide is enabled.
- Folder-mode Targets filter Manny, Quinn, and/or MetaHuman outputs. Create fixed copy next to original and Overwrite/Reprocess already completed animations control output replacement.
- Push Strength, SOMA Guide Weight, Temporal Smoothing Passes, Clearance (cm), Max Push Per Frame (cm), Solver Iterations, and Pose Limit Scale tune the pose solver.
- Apply Self Collision Pose Fix starts the operation, and Stop requests cancellation while the batch is active.
Target Foot Sole Grounding
Overview: Measures target foot sole height and applies vertical correction so exported animations stand on the desired ground plane.

- AnimSequence, Add Selected AnimSequences, AnimSequence Paths, and Folder Path (recursive) use the same single/list/folder source workflow as the other offline cleanup tools.
- Folder-mode Targets filter Manny, Quinn, and/or MetaHuman outputs. Create fixed copy next to original and Overwrite/Reprocess already completed animations control output replacement.
- Use contact frames when available prefers detected contact frames for measuring sole height. Ground Offset (cm) sets the desired sole height, and Max Correction (cm) clamps the applied vertical correction.
- Apply Target Foot Sole Grounding starts the operation, and Stop requests cancellation while the batch is active.
MetaHuman Level Sequence
Overview: Creates a MetaHuman Level Sequence from exported MetaHuman AnimSequences, with optional clip alignment and transition gap controls.
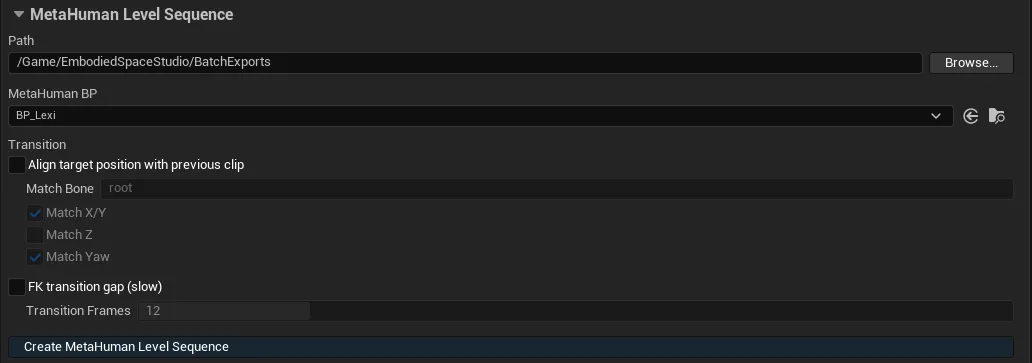
- Path scans for MetaHuman AnimSequence assets under the selected
/Gamefolder. - MetaHuman BP selects the actor blueprint to spawn/bind in the generated Level Sequence.
- Transition controls include Align target position with previous clip, Match Bone, Match X/Y, Match Z, and Match Yaw for continuity between clips.
- FK transition gap (slow) optionally bakes through the built-in FK Control Rig, and Transition Frames sets the inserted gap length when that option is enabled.
- Create MetaHuman Level Sequence creates a new Level Sequence asset, spawns the MetaHuman, adds body animation sections, and places a Level Sequence actor.
Level Sequence Prompt Subtitles
Overview: Adds prompt-derived 3D subtitle actors to a Level Sequence so generated motions can be reviewed with their source prompt text in context.
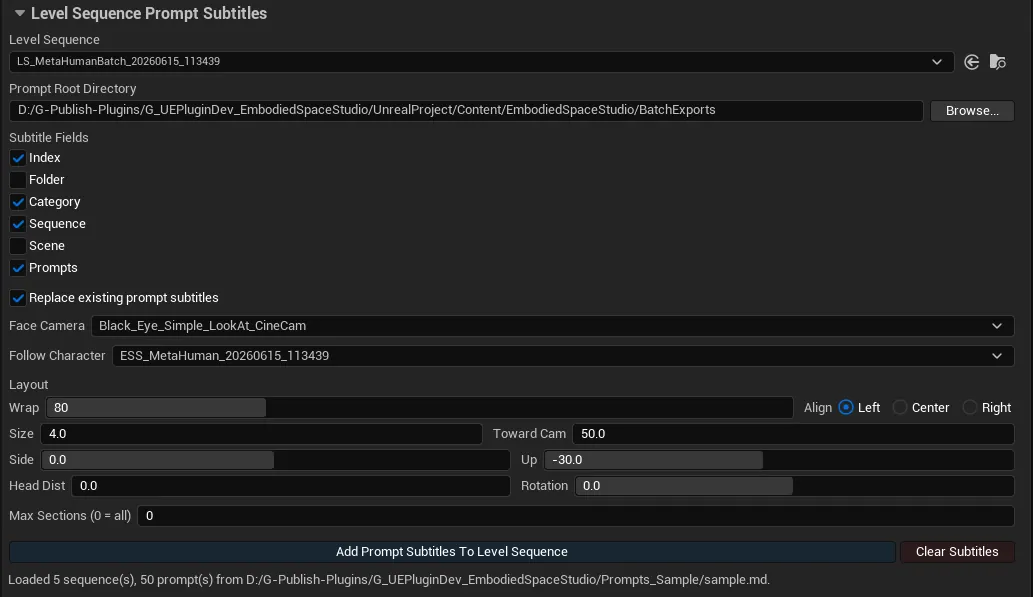
- Level Sequence chooses the sequence to annotate. Prompt Root Directory chooses where the prompt Markdown/data is resolved from and can be a
/Gamepath or filesystem folder. - Subtitle Fields toggles Index, Folder, Category, Sequence, Scene, and Prompts. Replace existing prompt subtitles removes previous tool-created subtitles before regenerating.
- Face Camera and Follow Character can auto-resolve from sequence bindings or target a specific camera/character binding.
- Layout controls Wrap, Align (Left/Center/Right), Size, Toward Cam, Side, Up, Head Dist, Rotation, and Max Sections (0 = all). Max Sections is useful for quick preview passes before generating all subtitles.
- Add Prompt Subtitles To Level Sequence creates subtitle actors/bindings. Clear Subtitles removes subtitles created by this tool.
The older SOMA Scale to MetaHuman UI is archived/hidden in the current Misc tab, so it is not listed as an active user-facing tool here.
Recommended Workflow
Place batch animations after exports are stable, run offline cleanup on fixed copies first, generate Fab packages into a clean output root, and use subtitle Max Sections for quick preview before annotating a full Level Sequence.